Inverse Triple Pendulum

Our institute has a triple pendulum connected to a cart that can be controlled by a computer. Stabilizing a pendulum in upright position is a common control benchmark. Controlling a double or triple pendulum requires powerful hardware and a sophisticated and well-tuned software. The hardware was set up by the Magdeburg-based company Hasomed, the software has been developed in our institute for over 20 years.
The triple pendulum is used to test control algorithms in experiments. As opposed to pure simulations, the application in hardware comes with additional challenges like delays in communication and changing environmental parameters.
Also, the pendulum is used to showcase the need and potential of control algorithms in regular visits of students or the public at our annual long night of science.
News
2019, September 11th: Visit of a project group from the Norbertus Gymnasium.
2020, March 1st: In cooperation with Hasomed, we revise the controller software and the interface to the hardware. The result will be test blocks for basic control tasks like the controlled transversion of the pendulum both in open loop and closed loop regimes. HASOMED co-sponsors the development and will distribute the developed software under a license agreement with the MPI-MD.
2021, December 15th. The IFAC organization has granted support for setting up a public model of the pendulum and for organization of an event where control engineers from around the world can test their methods on our setup.
Resources
-
This poster explains the setup and the basic procedures of the control scheme as well as typical application areas (in German).
-
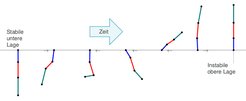
This video shows the swingup and swingdown of the triple pendulum in slow motion:
