Erzeugung von Bewegungsabläufen bei Schlaganfallpatienten durch geregelte Elektrostimulation
Forschungsbericht (importiert) 2008 - Max-Planck-Institut für Dynamik komplexer technischer Systeme
Schlaganfall ist die häufigste Ursache für lang anhaltende Behinderungen in den industrialisierten Ländern. Allein in Deutschland erleiden ca. 250.000 Menschen pro Jahr einen Schlaganfall. In der Regel wird hierdurch die Motorik der Betroffenen beeinträchtigt, wobei die teilweisen Lähmungen (Paresen) gewöhnlich nur eine Körperhälfte betreffen. Rund ein Drittel aller Schlaganfallpatienten bleibt trotz intensiver Rehabilitationsmaßnahmen dauerhaft behindert. Es existiert deshalb ein großer Bedarf an neuen Verfahren und technischen Hilfen für die motorische Rehabilitation von Schlaganfallpatienten, um die Genesung der Betroffenen zu beschleunigen. Grundlage der neurologischen Rehabilitation nach einem Schlaganfall ist das wiederholte Üben der von der Lähmung betroffenen Bewegungsmuster. Hierdurch wird das zentrale Nervensystem mit Reizen, die der zu erlernenden Bewegung zugeordnet sind, versorgt. Ein Wiedererlernen von Bewegungen ist dann aufgrund der Anpassungsfähigkeit (Plastizität) des Gehirns möglich. Nicht vom Schlaganfall betroffene Areale im Gehirn übernehmen hierbei die Aufgaben der gestörten Bereiche. Dieser Prozess ist mitunter sehr langsam und erfordert unter anderem eine große Zahl von Übungseinheiten. Je nach Grad der Lähmung benötigen die Patienten während der Bewegungstherapie Hilfe. Neben der manuellen Therapie durch Physiotherapeuten hat sich der Einsatz von Maschinen zur Bewegungsunterstützung in der Praxis bewährt. Letztere erlauben es, Bewegungsabläufe der Arme und Beine sehr viel öfter und genauer zu realisieren, als dies bei der manuellen Therapie möglich wäre. Außerdem werden durch die maschinelle Unterstützung Therapeuten von oft schwerer körperlicher Arbeit, wie sie beispielsweise bei der Gangtherapie von Patienten mit schweren Lähmungserscheinungen notwendig ist, entlastet.
Funktionelle Elektrostimulation (FES) der gelähmten Muskeln
Eine andere Maßnahme zur Generierung von Bewegungen ist die Reizung der zentral (d. h. von einer Schädigung des zentralen Nervensystems herrührend) gelähmten Muskulatur mittels künstlicher elektrischer Stimulationsimpulse. Die Stimulation erfolgt auf indirekte Art und Weise über Klebeelektroden auf der Haut: Statt der Muskelfasern selbst werden die die gelähmten Muskeln versorgenden Nerven stimuliert, weil diese eine wesentlich geringere Reizschwelle besitzen. Im Gegensatz zu den oben genannten Maßnahmen zur Bewegungsunterstützung wird bei der FES die betroffene Muskulatur aktiv einbezogen. Dies wirkt sich in zweierlei Hinsicht positiv aus: Zum einen senden körpereigene Sensoren für Muskelkraft und -länge verstärkt Signale an das Rückenmark und Gehirn und fördern so den Prozess der motorischen Bahnung. Zum anderen können hierdurch Muskeln aufgebaut bzw. kann dem Abbau von Muskeln als Folge der Lähmung entgegengewirkt werden. In der klinischen Praxis steht z. Z. noch der zweite Effekt im Vordergrund. Aus einer Reihe von Gründen ist die Erzeugung präziser Bewegungen durch FES eine anspruchsvolle Aufgabe:
- Das dynamische Verhalten der stimulierten Muskulatur ist nichtlinear und zeitveränderlich (Muskelermüdung).
- Patienten sind in der Regel nicht komplett gelähmt und können die Stimulation unterstützen. Dies macht es jedoch schwierig, die notwendige Stimulationsintensität vorherzusagen.
- Durch die Stimulation können ungewollte Reflexe ausgelöst werden, welche die gewünschte Bewegung hemmen. Bei vielen Patienten treten beispielsweise Spastiken (geschwindigkeitsabhängiger Widerstand gegen Bewegungen) auf.
Eine Lösung des Problems erfordert die Verwendung einer Regelung (Rückkopplung). Hierbei wird das Ergebnis der Stimulation fortlaufend mittels spezieller Messverfahren und Sensoren überwacht und im Falle einer Abweichung vom gewünschten Verhalten eine zielgerichtete Anpassung der Stimulationsparameter vorgenommen. Im Folgenden werden beispielhaft zwei Systeme zur Bewegungsgenerierung mit geregelter Elektrostimulation für Schlaganfallpatienten vorgestellt.
FES-Fahrradergometer für Schlaganfallpatienten
Das Fahrradfahren mit einem Ergometer gehört mittlerweile zur Standardtherapie eines jeden Schlaganfallpatienten. Mittels spezieller Ergometer können auch schwer betroffene Patienten solche Übungen vom Rollstuhl aus durchführen. Zur optimalen Unterstützung oder Hemmung der Bewegung in Abhängigkeit vom Zustand der Patienten werden häufig Elektromotoren in die Ergometer integriert. Die Bewegungsmuster beim Fahrradfahren und Gehen zeigen auffällige Ähnlichkeiten. Beide Muster sind zyklisch mit phasenverschobenen Muskelaktivitäten bezüglich beider Beine. Dies lässt den Rückschluss zu, dass Fahrradfahren eine geeignete Vorbereitung für eine Gangtherapie darstellt. Fahrradfahren führt ferner zu Verbesserungen von Muskelkraft, Herz-Kreislauf-Funktionen und Ausdauer. Dies begünstigt eine erfolgreiche Wiederherstellung der Gehfähigkeit.
In Zusammenarbeit mit der Firma HASOMED wurde ein motorunterstütztes Ergometersystem mit Elektrostimulation entwickelt (Abb. 1). Fahrradfahren mit Elektrostimulation begünstigt einen schnelleren Muskelaufbau und stellt dem zentralen Nervensystem intensivere Bewegungsreize zur Verfügung. Des Weiteren hilft die Stimulation dem Patienten bei der Einübung des korrekten Bewegungsmusters. Mit dem realisierten System können bis zu 8 Muskelgruppen synchron zur Tretbewegung stimuliert werden. In der Regel werden Kniestrecker und -beuger sowie die Hüftstrecker benötigt. Damit die Muskeln zum richtigen Zeitpunkt aktiviert und deaktiviert werden können, wird die Beinstellung fortlaufend über eine Messung des Kurbelwinkels am Ergometer erfasst. Abhängig von Kurbelwinkel und Trittfrequenz erfolgt dann die Stimulation der verschiedenen Muskeln.
.")

Das entwickelte FES-Ergometer ist bereits in mehreren neurologischen Kliniken im Einsatz, sodass der klinische Nutzen des Systems evaluiert werden konnte. Eine kooperierende Forschungsgruppe aus Mailand führte eine kontrollierte randomisierte klinische Studie mit 20 Patienten durch, bei der die Kombination von FES-Fahrradfahren und Standardtherapie mit reiner Standardtherapie gleichen Umfangs verglichen wurde [1]. Das Trainingsprotokoll beinhaltete eine Stimulation der oben genannten Muskeln und des Fußhebers. Nach vierwöchigem Training mit täglich 35-minütigem FES-Fahrradfahren zeigte die Gruppe der FES-Fahrradfahrer signifikant bessere Ergebnisse in Bezug auf motorische Rehabilitation und Muskelstärke als die Kontrollgruppe.
Der in der beschriebenen Studie verwendete Stimulationsansatz zielt auf eine symmetrische Bewegung beider Beine. Insbesondere sollen die durch jedes Bein erzeugten durchschnittlichen Drehmomente übereinstimmen. Diese Forderung ist ohne den Einsatz einer komplexen Regelung nicht zu erreichen, da die genaue Wirkung der Stimulation nur schwer vorherzusagen ist. Gelähmtes und gesundes Bein können beispielsweise verschieden auf die Stimulation reagieren. Ferner gibt es Variationen in der Stimulationsantwort von Tag zu Tag. Gründe hierfür können unterschiedliche Elektrodenpositionen oder auch der Therapiefortschritt des Patienten sein. In Zusammenarbeit mit Kooperationspartnern wurde eine so genannte Symmetrieregelung entwickelt [2]. Aus Kraftmessungen an beiden Kurbelarmen wird das von jedem Bein erzeugte durchschnittliche Drehmoment pro Tretzyklus ermittelt. Mit einem komplexen Algorithmus werden dann die Stimulationsintensitäten für beide Beine individuell angepasst, sodass sich Symmetrie bei maximal erzielbarem Drehmoment einstellt. Dieses Verfahren wurde erfolgreich an Patienten getestet.
Weitere Forschungsarbeiten zum FES-Fahrradfahren haben sich mit der Ermittlung von Stimulationsparametern beschäftigt, die die schnelle Ermüdung elektrisch stimulierter Muskeln hinauszögern. Wenn ein Muskel beim FES-Fahrradfahren aktiv ist, wird gewöhnlich eine Folge von Stimulationsimpulsen mit konstanter Frequenz generiert, die Änderung der Intensität wird durch Veränderung von Impulsweite und -amplitude bewirkt. Mittels experimenteller Untersuchungen konnte jedoch gezeigt werden, dass Impulsfolgen mit variabler Frequenz zu besserer Kraftentwicklung bei geringerer Ermüdung führen [3].
Regelung von Fallfußstimulatoren
Ein Schlaganfall führt häufig zur Beeinträchtigung des Ganges bei den Betroffenen. Insbesondere tritt bei ca. 10–20 Prozent der wieder gehfähigen Patienten eine unzureichende Fußhebung in der Schwungphase auf. Dadurch wird eine Ausweichbewegung verursacht, bei der der betroffene Fuß schleifend in einem Halbkreis nach vorne gezogen wird. Ein solches Krankheitsbild wird als Fallfuß (drop-foot) bezeichnet.
Um das normale Gangbild wieder herzustellen, muss der Fußheber der betroffenen Seite durch Training gestärkt und wieder in das Gangmuster integriert werden. Dies kann durch elektrische Stimulation der betroffenen Muskulatur erfolgen. Hierzu muss die Stimulation zu einem geeigneten Zeitpunkt während des Gehens aktiviert werden.
Erste Ansätze zur Stimulation von Fallfußpatienten existieren bereits seit 1961. Die meisten zurzeit kommerziell verfügbaren Systeme stimulieren über ein Paar von Klebeelektroden den Wadenbeinnerv (Nervus peronaeus), welcher u. a. den Fußheber (M. Tibialis Anterior) innerviert. Durch die Reizung des Nervs wird neben der Kontraktion des Fußhebers oft auch ein Reflex ausgelöst, der zu einer Beugung von Knie- und Hüftgelenk auf der betroffenen Seite führt und somit die Schrittbewegung unterstützt. Die Stimulation wird bei solchen Systemen in der Regel mittels eines einfachen Kontaktschalters unter der Fußsohle mit dem Gang synchronisiert. In der Schwungphase (kein Bodenkontakt) wird dann ein fest eingestelltes Stimulationsmuster ausgegeben. Der Nachteil solch einfacher Fallfußstimulatoren liegt darin, dass die Stimulationsstärke per Hand angepasst werden muss, wenn z. B. ein Therapieeffekt beim geschwächten Muskel auftritt oder wenn die Elektroden leicht versetzt angebracht wurden. Des Weiteren können sich langsam ändernde Störungen wie Ermüdung nicht ausgeglichen werden. Ein weiterer Nachteil solcher Systeme ist, dass sie in der Regel überstimulieren, um sicherzustellen, dass der Muskel ausreichend Kraft erzeugt. Dadurch ermüdet der Muskel aber vorzeitig.
Eine konventionelle Regelung mit kontinuierlichem Soll-Ist-Vergleich ist aufgrund der physiologischen Randbedingungen (zeitlich begrenzte Schwungphase (1–3 s), Zeitverzögerung bei der Muskelantwort) aber nicht praktikabel. Stattdessen bietet sich an, Elemente von Steuerung (open-loop) und Regelung (closed-loop) in einer adaptiven beziehungsweise lernenden Steuerung zu kombinieren: Nach jedem Schritt wird die gemessene Bewegung ausgewertet und als Reaktion das Stimulationsprofil für den nächsten Schritt angepasst. Während eines Schrittes erfolgt die Stimulation also „open-loop“. Eine Rückkopplung der gemessenen Bewegung (Regelung) findet lediglich zwischen den Schritten statt.
Im Hinblick auf eine praktische Realisierung benötigt man einen unauffälligen Sensor, welcher den Sprunggelenkwinkel oder zumindest den Winkel des Fußes bezüglich des Bodens misst. Ein solcher Sensor existiert bisher nicht. In Zusammenarbeit mit der Technischen Universität Berlin wurden zwei geeignete Sensoren und zwei Ansätze zur Regelung / adaptiven Steuerung entwickelt.
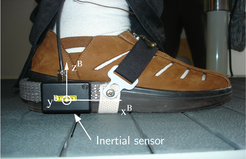
Die Verwendung eines vollständigen Inertialsensors (Messung von 3 Beschleunigungen und 3 Winkelraten orthogonal zueinander) stellt eine Möglichkeit zur Erfassung der Fußhebung und zur Gangphasenerkennung dar [4]. Ein solcher Sensor wird, wie in Abbildung 2 gezeigt, am Schuh des Patienten befestigt und erlaubt u. a. die Schätzung des Winkels zwischen Fuß und Boden. Basierend auf diesem Sensor konnte eine adaptive Steuerung realisiert werden, mit der der Winkel des Fußes beim Aufsetzen auf den Boden gezielt angepasst werden kann. Hierbei wird die Amplitude des trapezförmigen Stimulationsverlaufes in der Schwungphase von Schritt zu Schritt adaptiert. An der St. Mauritius Therapieklinik in Meerbusch wurde das Konzept mit Schlaganfallpatienten validiert.

Ein anderer innovativer Ansatz, mit dem der Fußgelenkwinkel direkt bestimmt werden kann, ist die Echtzeiterfassung von Änderungen der Bio-Impedanz (BI) des Beines [5,6]. Die aufgrund der Bewegung verursachten BI-Änderungen korrelieren nahezu linear mit dem Fußgelenkwinkel im interessierenden Winkelbereich. Zur Bestimmung der BI wird ein sehr kleiner sinusförmiger Strom mit konstanter Amplitude und einer Frequenz von 50 kHz am Bein eingespeist. An zwei vom Einprägungsort verschiedenen Punkten wird dann eine vom Widerstand abhängige Spannung gemessen, anhand derer die Bio-Impedanz bestimmt werden kann. Basierend auf der Winkelmessung mittels Bio-Impedanz wurde eine iterative lernende Steuerung für Fallfußstimulatoren entwickelt. Hierbei soll durch elektrische Stimulation des Fußhebers ein gewünschter Winkelverlauf für das Sprunggelenk realisiert werden. Dieser Ansatz wurde mit gesunden Probanden bereits erfolgreich in Zusammenarbeit mit der Charité Universitätsmedizin Berlin überprüft [5,6].
Fazit
Die vorgestellten Arbeiten verdeutlichen die Leistungsfähigkeit geeigneter Regelungskonzepte bei der Generierung gewünschter Bewegungsmuster durch FES. Voraussetzung für jede Regelung ist jedoch eine entsprechende Sensorik zur Erfassung des Bewegungszustandes. Während eine solche Sensorik für das Anwendungsbeispiel FES-Ergometer existiert, mussten für das Anwendungsbeispiel Fallfußstimulator geeignete Messverfahren entwickelt werden.